Einstieg
Ein einfacher Roboter hat vorne zwei Helligkeits-Sensoren und seitlich je ein Rad.
Beobachten Sie sein Verhalten.
Hinweis: Sie können den Roboter mit Klick und Drag neu platzieren und ausrichten.
Verhalten
Der Roboter weist zwei Sensoren und zwei Motoren auf, die je ein seitliches Rad antreiben.
Verändern Sie die Verdrahtung (gekreuzt ←→ parallel) und die Kopplung Sensor-Motor (direkt ←→ indirekt) des Roboters.
Versuchen Sie das Verhalten der vier Roboter-Typen zu beschreiben.
Hinweis: Sie können den Roboter mit Klick und Drag neu platzieren und ausrichten.
Lösungshinweise
Jeder Roboter zeigt für sich typisches Verhalten:
- X+: fürchtet sich vor dem Licht
- ∥+: stürzt sich aggressiv auf das Licht
- X-: liebt das Licht und verweilt am Licht
- ∥-: liebt das Licht, sucht aber weitere Lichtquellen
Das Verhalten ist aber ebenso stark von der Umgebung des Roboters abhängig. Sein Verhalten entsteht im Wechselspiel mit seiner Umwelt:
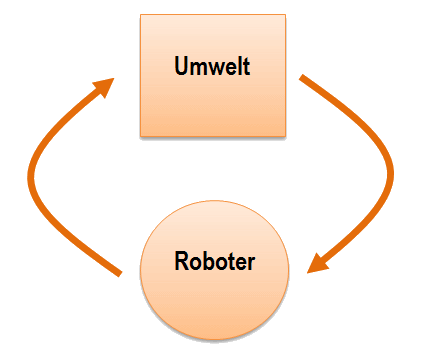
Die spontane Herausbildung des Verhaltens aus diesem Wechselspiel wird als Emergenz bezeichnet.
Diese sehr einfach gebauten Roboter zeigen bereits sehr komplexes Verhalten, obwohl sie auf Reize aus der Umgebung nur reflexartig reagieren. Man geht davon aus, dass viele einfache Lebewesen nur Reflexe zeigen, aber trotzdem vielschichtiges Verhalten aufweisen.
Valentin Braitenberg (1926-2011) hat in seinem Buch Vehicles. Experiments in Synthetic Psychology
(1984) diese vier und weitere Vehikel vorgeschlagen und untersucht. Sein Werk hat die Robotik stark beeinflusst und man spricht von den Braitenberg Vehikeln. Die vier untersuchten Roboter entsprechen von oben nach unten den Vehikeln 2a, 2b, 3a, 3b von Braitenberg.
Gestalt
Sie können neu die Distanz zwischen den Sensoren beeinflussen. Beobachten Sie, welchen Einfluss dies auf das Verhalten des Roboters hat.
Lösungshinweise
Der Roboter dreht schneller, wenn die Sensoren weiter auseinander liegen. Es zeigt sich, dass die Anordnung der Sensoren einen Einfluss auf das Verhalten des Roboters hat. Insgesamt bilden Art, Form, Grösse und Anordnung der Bauteile die Gestalt eines Roboters. Diese wird als Morphologie bezeichnet.
Da die Morphologie eines Roboters nur im Wechselspiel mit der Umwelt Verhalten entstehen lässt, erforscht man heute künstliche Intelligenz oft mit Embodiment. D.h. man baut und programmiert einen Roboter und beobachtet sein Verhalten in einer bestimmten oder in verschiedenen Umgebungen.
Autonom
Kann man einem derart einfachen Roboter Aufgaben zur autonomen Ausführung übertragen? Testen Sie Möglichkeiten und Grenzen aus...
Lösungshinweise
- Der Roboter kann zuverlässig einer Spur folgen. Dies könnte bei Transportrobotern in einer Industriehalle mit aufgemalten Spuren zum Einsatz kommen. Doch Kollisionen oder Lade- und Entladehalte sind noch nicht gelöst.
- Der einfache Roboter ist wie ein automatischer Rasenmäher, dessen Arbeitsgebiet mit einer Drahtschleife begrenzt ist. Doch mäht er in dieser Version meist nur entlang der Begrenzung.
- Er findet den Weg aus einem einfachen Labyrinth. Leider nicht sehr zuverlässig.
Dieses Experiment zeigt, dass ein äusserst einfacher Roboter als Basis für ausgeklügeltere Modelle dienen kann. Diese müssen mit einer Kontrolleinheit (Hard- und Software) ergänzt werden. Dies führt uns zur Definition von Robotern.
Roboter weisen folgende Bauteile auf:
- Sensoren: Helligkeit, Druck, Infrarot, Mikrophon, Kamera, Beschleunigung, ...
- Steuerung: Mikrokontroller und Software
- Aktuatoren: Motoren, Räder, Soundgenerator, LED, ...
- Energieversorgung: Batterie, Akku, Solarpanels, ...
Zudem verfügen Roboter über einen Körper.
Definition von Roboter:
Ein Roboter ist...
- ... ein künstliches Gerät, das seine Umgebung wahrnimmt und gezielt in ihr agiert.
- ... eine verkörperte künstliche Intelligenz.
- ... eine Maschine die autonom notwendige Arbeit ausführt.
Keine dieser Definitionen umfasst alle Roboter, sondern jede streicht Schlüsseleigenschaften von Robotern heraus.